理解块层、多队列和 Device Mapper
本章将讨论以下主题:
- 单请求队列模型的问题
- 多队列块 I/O 机制(blk-mq)
- Device Mapper 框架
- 块层中的多层缓存机制
技术要求
除前几章提到的 Linux 基础外,本章还涉及现代处理器与存储设备的一些基本概念。若你有 Linux 存储管理实践经验,理解会更顺畅。
本章命令和示例与发行版无关,可在 Debian、Ubuntu、Red Hat、Fedora 等系统上运行。
若需要内核源码,可从 https://www.kernel.org 下载。书中代码片段基于 Linux 内核 5.19.9。
单请求队列模型的问题
操作系统需要尽可能发挥块设备性能。应用对块设备的 I/O 可能落在任意位置,这意味着频繁寻址。对机械盘来说,大量随机访问不但会拉低性能,还可能带来明显的寻道噪声。
早期块层设计主要面向机械盘时代,当时设备 IOPS 规模远低于今天。后来发生了两个关键变化:
- 多核处理器普及
- SSD / NVMe 等新型存储快速发展
瓶颈从物理硬件逐步转移到了内核软件层。
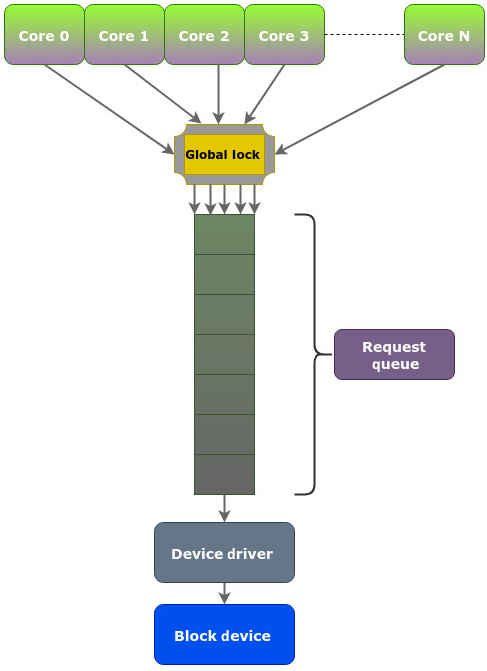
传统块层模型中,I/O 请求处理通常是下面两种方式之一:
- 通过单个请求队列(链表)排队,新的请求追加到队尾,随后执行合并/重排等处理再交给驱动。
- 某些场景直接绕过队列,把请求交给驱动,导致本可在队列阶段完成的优化转移到驱动侧,通常性能更差。
即便使用现代 SSD,单队列模型仍有三类核心问题:
- 锁竞争:多核共享一个请求队列,必须通过全局锁同步。一个核心持锁时,其他核心只能等待。
- 缓存一致性压力:每核缓存可能持有共享数据副本,更新传播与一致性维护引入额外开销。
- 中断增多:锁在核心间频繁切换,导致更多中断与上下文干扰。
结论是:核心数越高,围绕单队列锁的争用越严重,大量 CPU 周期被浪费在自旋等待上,尤其在多路 CPU 系统上会显著压低 IOPS。
图 5.1 展示了单队列模型的结构性瓶颈:
随着企业存储大规模转向 SSD 与非易失内存,设备本身已可并行处理大量请求,随机访问惩罚也显著降低。旧模型无法继续匹配硬件能力,块层必须演进。
理解多队列块 I/O 框架(blk-mq)
Linux 存储栈和网络栈在设计上很像:都是分层结构,都需要在驱动/硬件能力变化后演进队列模型。网络栈比存储栈更早从单队列走向多队列,块层后来吸收这一经验,形成了 blk-mq 框架。
blk-mq 的核心思想是“按 CPU 核心隔离请求队列”,从而解决前述单队列三大问题:
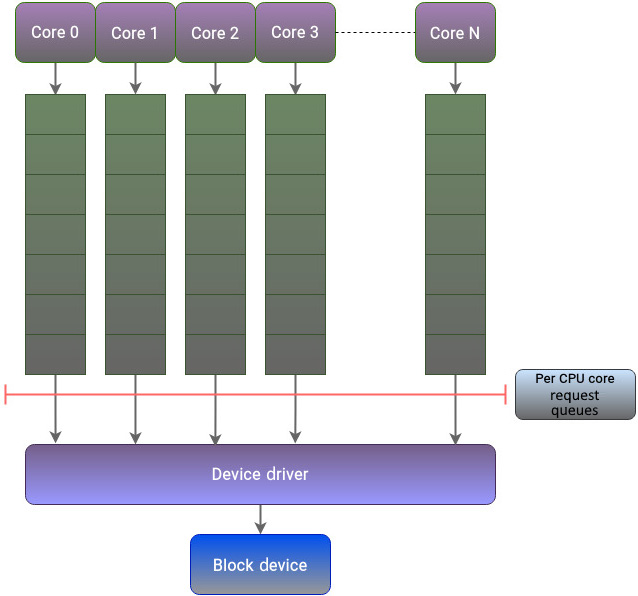
采用该模型后,每个核心主要处理自己的请求路径,不再频繁争夺全局锁,锁竞争、中断压力与缓存一致性负担都明显下降。
两级队列设计
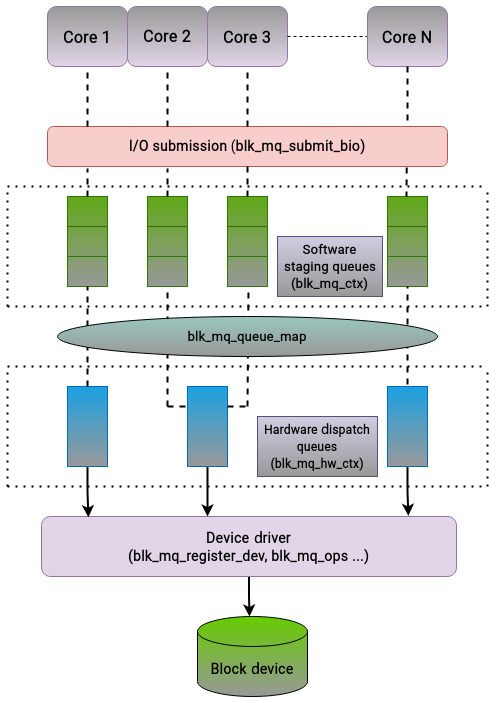
blk-mq 采用两级队列:
- 软件暂存队列(software staging queues)
- 硬件分发队列(hardware dispatch queues)
软件暂存队列通常按 CPU 维度分配(常见是一核一队列)。每个核心把 I/O 提交到自己的队列,再汇入驱动路径。
这一步仍可做重排或合并,但对 SSD/NVMe 来说顺序与随机差异不像机械盘时代那么敏感。
硬件分发队列数量由硬件与驱动支持的硬件上下文决定,且不会超过系统核心数。
软件队列和硬件队列之间可以是小于、等于或大于关系,由映射策略决定。
当块设备没有绑定 I/O 调度器时,blk-mq 可把请求直接送入硬件队列。
Tag 机制
多队列 API 使用 tag 标识请求完成状态。每个请求会分配一个整型 tag(范围在队列大小内):
- 块层生成 tag
- 驱动复用该标识处理请求
- 请求完成后驱动返回 tag 给块层
这样避免了重复标识与额外同步成本。
关键结构
实现多队列块层时,几个结构最关键:
blk_mq_tag_set:注册块设备队列能力时的核心参数集blk_mq_ops:驱动与 blk-mq 的操作接口blk_mq_ctx:软件暂存队列上下文(按 CPU 分配)blk_mq_hw_ctx:硬件分发队列上下文blk_mq_queue_map:软件队列到硬件队列的映射blk_mq_submit_bio:提交请求入口之一
它们的关联关系如下:
总结:blk-mq 解决的是“旧块层模型无法匹配现代多核与多队列存储设备”的根本问题,通过“每核队列 + 硬件分发队列”双层设计显著提升并行 I/O 吞吐。
Device Mapper 框架
直接管理物理块设备比较“硬”,能力边界明显。现代存储常见的精简配置、快照、卷管理、加密、多路径等能力,本质都需要一层可编排的映射抽象。
Linux 通过 Device Mapper(DM)提供这层能力:
把底层物理块设备映射成上层虚拟块设备,并允许在 bio 传输过程中进行重写/重映射。
这一框架是 LVM 等功能的基础。
Device Mapper 的职责分层是:
- 用户态定义策略(如何映射)
- 内核态执行策略(如何实现映射)
其应用接口主要基于 ioctl,常见用户态工具是 dmsetup,配套库是 libdevmapper:
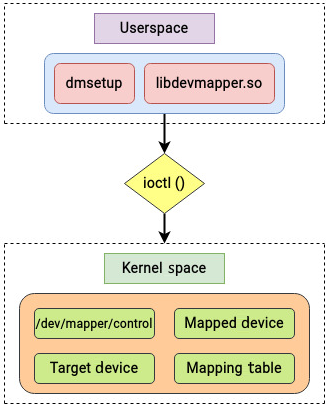
如果对 dmsetup 做 strace,可以看到其通过 libdevmapper,再通过 ioctl 与 /dev/mapper/control 通信。
三个核心组件
Device Mapper 内核部分可概括为三块:
- Mapped Device(映射后的逻辑设备)
- Mapping Table(映射表)
- Target Device(目标映射类型/目标设备)
Mapped Device
Mapped device 是 DM 提供的逻辑块设备,通常出现在 /dev/mapper 下。
LVM 里的逻辑卷就是典型 mapped device。其内核结构 mapped_device 中也会持有 gendisk 指针。
Mapping Table
映射表定义“逻辑扇区范围 -> 目标设备范围”的关系。
可通过 dmsetup 查看或更新。映射表是 DM 能动态创建/修改/删除映射的关键。
Target Device
Target 可以理解为映射插件。不同 target 支持不同语义,如线性、镜像、快照、多路径等。
DM 的映射单位是 sector(扇区)。
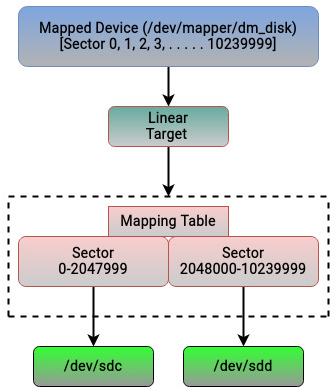
线性映射示例(linear target)
下面用 linear target 演示基本映射思路(也是 LVM 的基础能力之一):
# 示例:将两个磁盘片段映射为一个逻辑设备 dm_disk
dmsetup create dm_disk
dm_disk: 0 2048000 linear 8:32 0
dm_disk: 2048000 8192000 linear 8:48 1024
解释如下:
- 创建逻辑设备
dm_disk,由sdc和sdd两块盘的扇区片段拼接得到。 - 第一行表示:
dm_disk的0~2047999扇区映射到/dev/sdc从0开始的扇区段。 - 第二行表示:
dm_disk后续8192000个扇区映射到/dev/sdd从1024开始的扇区段。 - 扇区总数:
2048000 + 8192000 = 10240000。 - 扇区大小若为
512B,总容量约5 GiB。
图 5.5 是上述线性映射的直观示意:
常见 target 类型
Device Mapper 支持很多 target,常见包括:
linear:连续区间线性映射(LVM 的基础)raid:软件 RAIDcrypt:块层加密stripe:条带化(类似 RAID0)multipath:多路径映射thin:精简配置(逻辑空间可大于物理空间,按写入分配)
LVM 与 Device Mapper 的关系
LVM 本质上就是基于 DM 的映射编排。其三个基本实体:
- PV(Physical Volume):物理卷,底层磁盘或分区
- VG(Volume Group):卷组,把 PV 空间切成 PE(Physical Extent),默认常见
4MB - LV(Logical Volume):逻辑卷,由 LE(Logical Extent)组成
在线性 target 下,LE 与 PE 一一对应;若使用 dm-raid 等 target,映射关系可变成多对一或一对多。
LVM 结构示意如下:
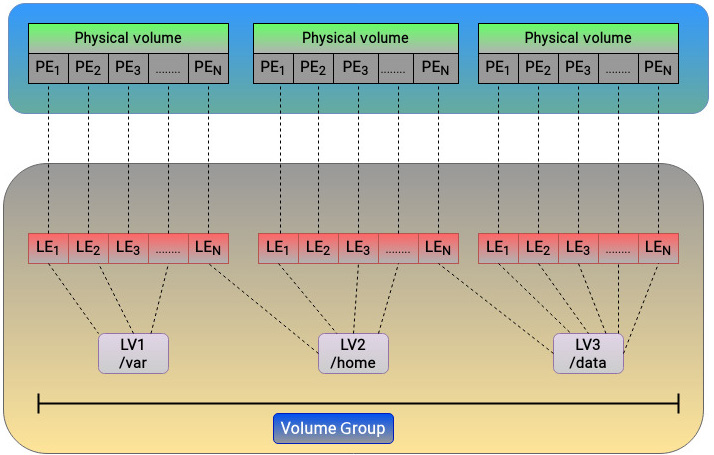
这一抽象层让扩容、迁移、重构存储布局都更灵活。
块层中的多层缓存机制
物理存储速度通常远低于 CPU 与内存。Linux 默认会利用内存做缓存,先在内存完成大量读写,再批量回写磁盘。
这是块设备性能优化的基础策略。
在混合存储场景中(机械盘 + SSD),常见策略是把热点数据放在快介质,把冷数据放到慢介质。
Linux 内核也支持类似分层缓存机制,常见方案包括 dm-cache、dm-writecache、bcache。
常见缓存模式
多数缓存方案支持以下模式:
- Write-back:先写缓存,不立即落慢盘
- Write-through:同时写目标盘,并保留缓存副本供后续读取
- Write-around:写请求绕过缓存直接落慢盘(缓存偏读)
- Pass-through:缓存旁路,读写都优先走原设备(通常要求缓存干净)
dm-cache 支持上述模式中的大部分(不含 write-around),核心涉及三个设备:
- Origin device:慢速主存储(通常机械盘)
- Cache device:高速缓存设备(通常 SSD)
- Metadata device:可选元数据设备(记录脏块、命中块等)
dm-writecache 顾名思义偏写缓存(write-back),不做读缓存。
其假设是读数据很多时候已经在页缓存里,收益重点在“先快介质落写,再后台回迁慢盘”。
bcache 则更激进,四种模式都可支持。它倾向于让大块顺序 I/O 直接落机械盘,把 SSD 留给随机 I/O 热点,通常更贴近“SSD 处理随机、HDD 承担容量”的实践。
总结
本章是块层主题的第二章,重点有两条主线:
blk-mq:解决单队列模型在多核与现代设备下的扩展性瓶颈- Device Mapper:提供块设备抽象编排能力,支撑 LVM/多路径/加密/RAID/精简配置等关键能力
我们先分析了单请求队列为何成为性能瓶颈,再看 blk-mq 如何通过双层队列架构修复这一问题。
随后解释了 Device Mapper 的用户态与内核态协作模型,以及 mapped device、mapping table、target 三个核心构件。
最后补充了块层多级缓存思路及 dm-cache、dm-writecache、bcache 等常见实现。
下一章将继续块层主题,进入 I/O 调度器与调度策略细节。